Existing robot manipulation datasets are mostly built around parallel-gripper embodiments or grasp-centric dexterous hands, offering limited coverage of tactile-rich dexterous interactions beyond grasping. To train tactile-reactive policies, we collect a large-scale robot play dataset with synchronized tactile observations on our bimanual dexterous embodiment.
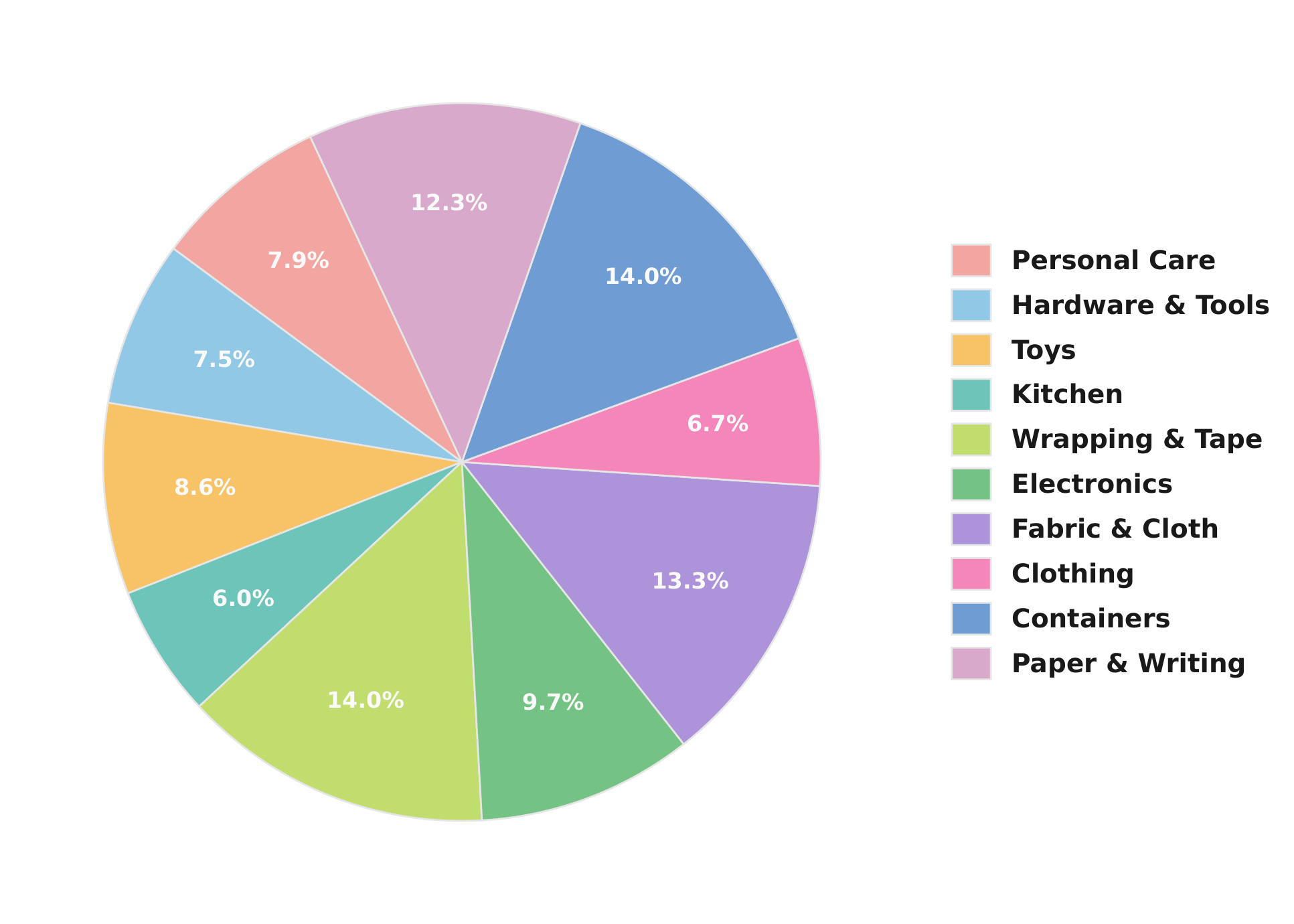
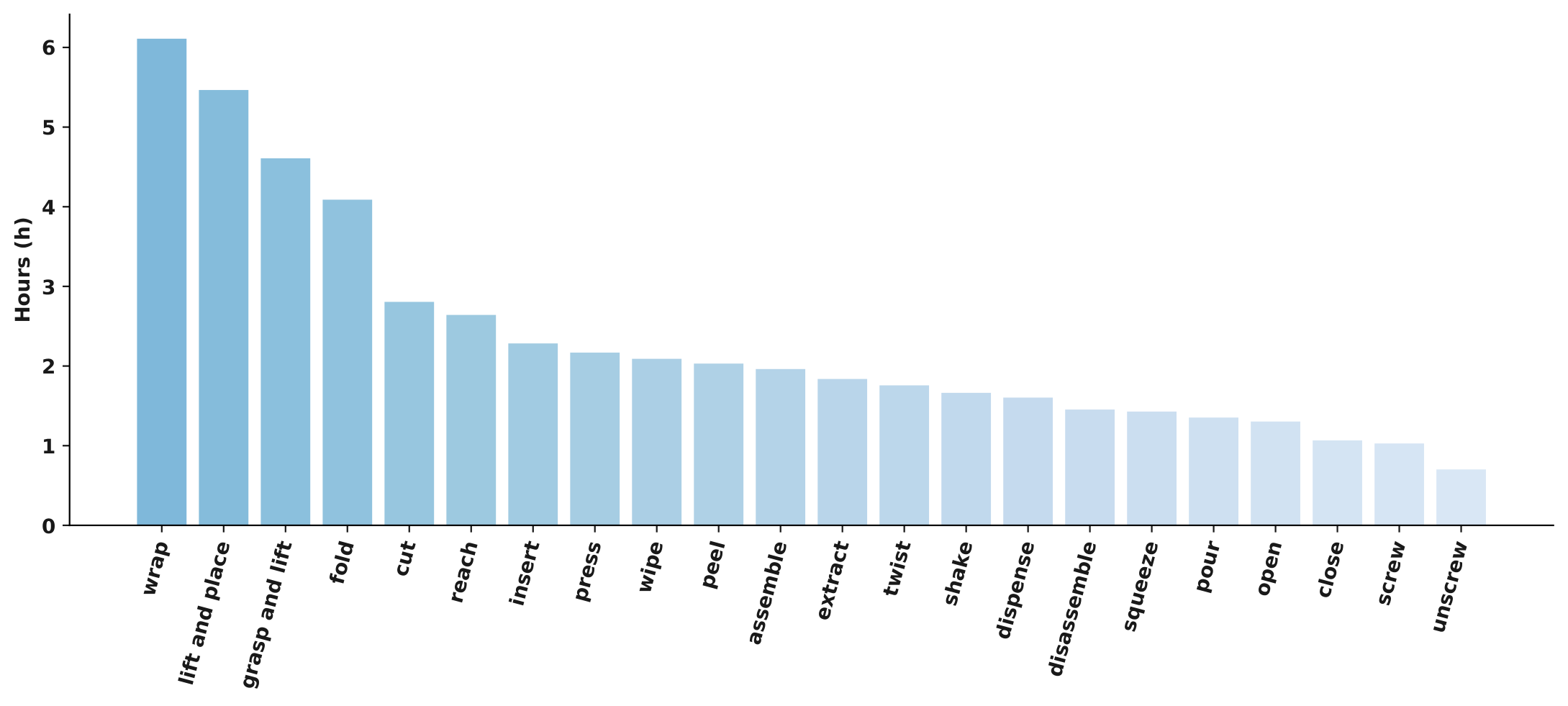
The T-Rex mid-training dataset consists of 50 open source hours of teleoperated bimanual dexterous manipulation episodes spanning more than 200 daily objects and 22 motion primitives. Episodes are designed around object × motion-primitive combinations for compact coverage of contact-rich behaviors, and include randomly selected distractor objects to encourage instruction-following under visual ambiguity.
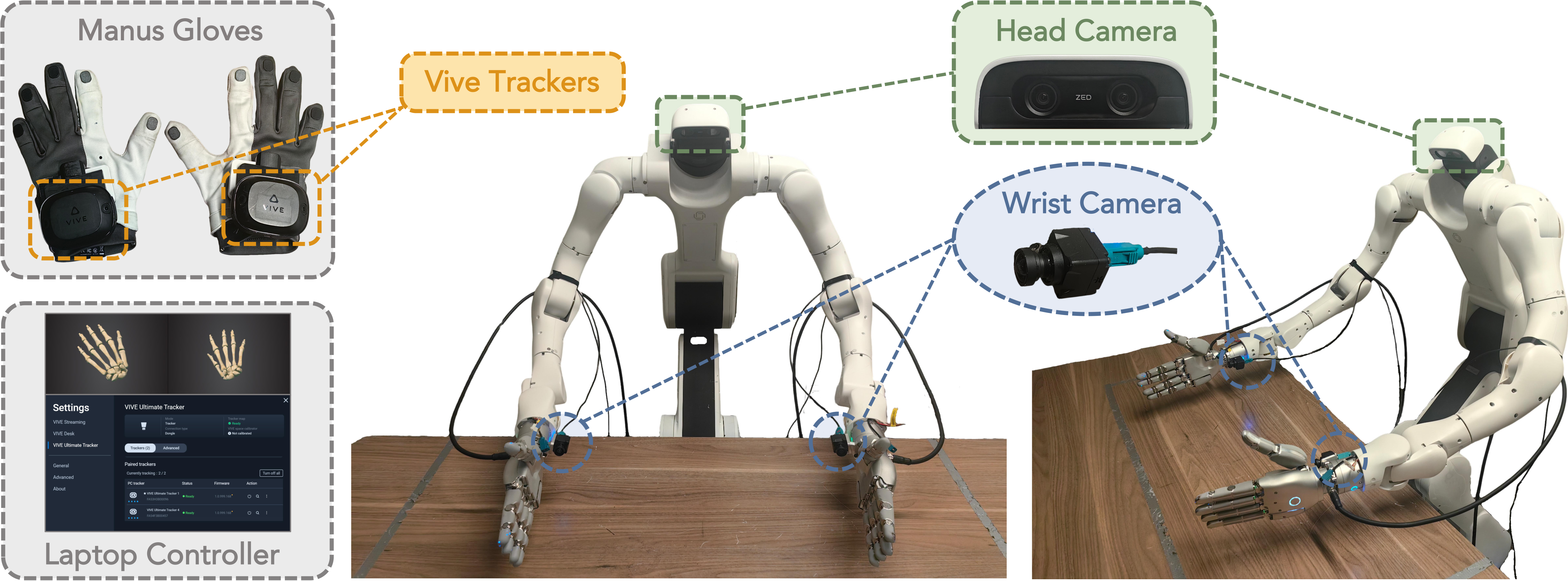
Data is collected on a bimanual Dexmate Vega-1 robot with a fixed base and two Sharpa Wave dexterous hands.